GitHub Wiki Notes
Sunswift Telemetry Overview
- Telemetry is about data on the car: the collection, flow and visualisation of the data
- It provides a fun, challenging and unique structure and framework to learn with a mix of:
- Interaction with low-level CAN data from sensors on the car
- Requires a good high-level understanding of cars, our car, how it works and what anomalies to spot (i.e. high motor temps)
- Writing client connection code in a large project and framework (EMBD-HighLevel, ROS2)
- Handling networks and persistent connections (both internal, external, TCP, HTTPS, MQTT, etc.)
- Using a variety of cloud tools (AWS, IoTCore, Timestream, EC2, Location Services, CloudWatch, Lambda, Cognito, etc.)
- System administration (on a small scale) for Grafana
- Large, complicated SQL queries from Grafana -> Timestream
- Authentication, application and network security (certificates, roles, rules, SSL/TLS, x.509, SSO, SAML, OIDC, etc.)
- UI/UX in Grafana, how to take a mammoth of data and make it "useful"
- Questions:
- What is CAN data? CANBus?
- What is client connection code EMBD-HighLevel, ROS2?
- How to work with network connections (TCP, HTTPS, MQTT)?
- What are the cloud tools used (AWS, IoTCore, Timestream, EC2, Location Services, CloudWatch, Lambda, Cognito, etc.)?
- SQL queries for Grafana -> Timestream
- What about authentication, application and network security (AWS, IoTCore, Timestream, EC2, Location Services, CloudWatch, Lambda, Cognito, etc.)?
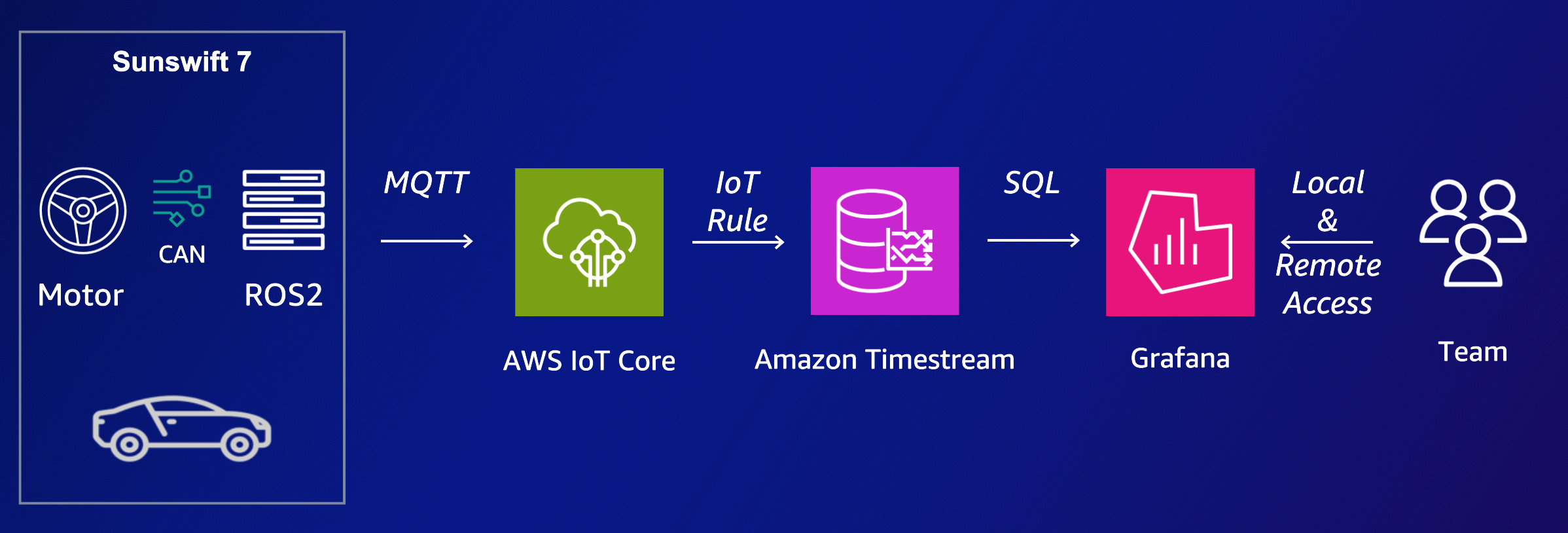
Telemetry EMBD 'HighLevel' Project
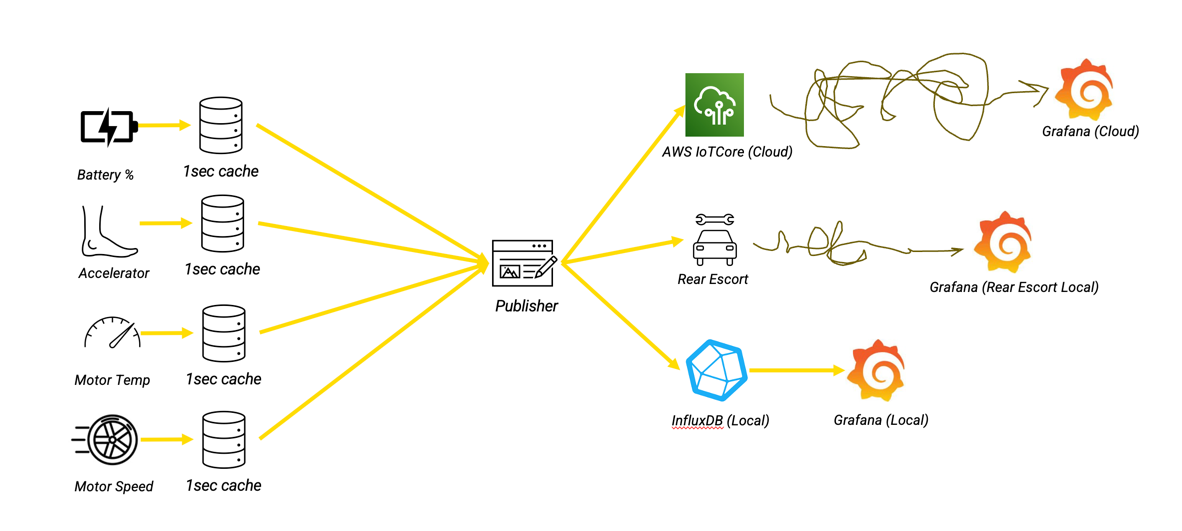
- Diagram explanation:
- Direct connection to IoTCore is the easiest way to write to IoTCore -> doesn't depend on the rear escort and can use any 4G connection the local router has
- Rear Escort has a solid PtP connection to the Solar Car -> it provides external (Starlink) network to the Solar Car, however it is not guaranteed to be up
- Local writing of the data to the rear escort means that people can still view telemetry data even if Starlink is down, without hindering the ROSCube performance
- Writing locally to an InfluxDB and a local Grafana instance means that someone in the Solar Car can login and view/monitor telemetry data if the Rear Escort set up goes down
- Basically, there are three Grafana set ups to ensure that telemetry data is always able to be accessed and viewed
There are several aspects to the local telemetry:
- The ROS2 telemetry node
- Interfaces with other ROS2 nodes
- Interfaces with AWS Greengrass
- Locally hosted Grafana and InfluxDB
- Network configurations within Sunswift7
ROS2 Node
- Subscribes to all (useful) events that get pushed around ROS2, manages the IoTCore connection, writes to InfluxDB and manages external parameters.
- It ignores nodes that are not
/car,/gps,/cruise,/sensorsor/limit
- It ignores nodes that are not
- GPS Latitude data is handled separately -> AWS documentation
- Odometer data is also handled separately -> repo link
- Bug with the odometer where it constantly goes up when the car is stationary -> possibly worth looking into
IOTCore ⁄ Greengrass Connection
- Wiki link
- Need to research later
psutil
- Python library used to report system telemetry
- Github repo link where the library was used
Potential Issues and Improvements
- AWS Improvements: Section Link
- Credential management for AWS IoTCore. This should be automated, without having to create and store certificate files. Similar to how Greengrass works.
- Rewriting this node in cpp. Big project, huge potential for performance boosts.
- InfluxDB connection management - this should also be "token-less", or at least not a token in plain sight.
- Persistent odometer isn't working
- Ability for this node to run on a different machine if we were to break off into "drive-control" and "other" machines.
- Greengrass connection logic is a bit scrappy and can be tidied up.
- Parameter fetching and setting spins up "new nodes" every time it is run. Research an alternative service call that doesn't have the overhead of extra nodes getting made each time.
- Split telemetry "reporting" from the parameter setting and more telemetry "logic" to split up what is becoming a larger node.
- Reporting logs through telemetry?
- Reduce the initialisation time (5 second sleep, etc.)
- Less hard-coding of what topics to ignore
- More back-and-forth interaction with AWS Cloud
- Remove bulky AWS IoT connection libraries for lighter-weight MQTT library
- Use Asynchrnous InfluxDB client
asyncioin Python is a wonderful albeit complicated library and syntax to get your head around at first. If this node remains in python, using that could be nice https://docs.python.org/3/library/asyncio.html- [Some random link from the T2 project planning page](Building Connected Vehicle Solutions on the AWS Cloud | The Internet of Things on AWS – Official Blog (amazon.com))
- Other considerations:
- James was talking about how embedded was able to ssh into the sunswift vehicle
Extracting Data from Timestream
- https://github.com/UNSW-Sunswift/SR-Telemetry/wiki/Extracting-Data-From-Timestream
- Also contains notes on challenges faced during BWSC and what we could improve